Senior Project Rumba Robot
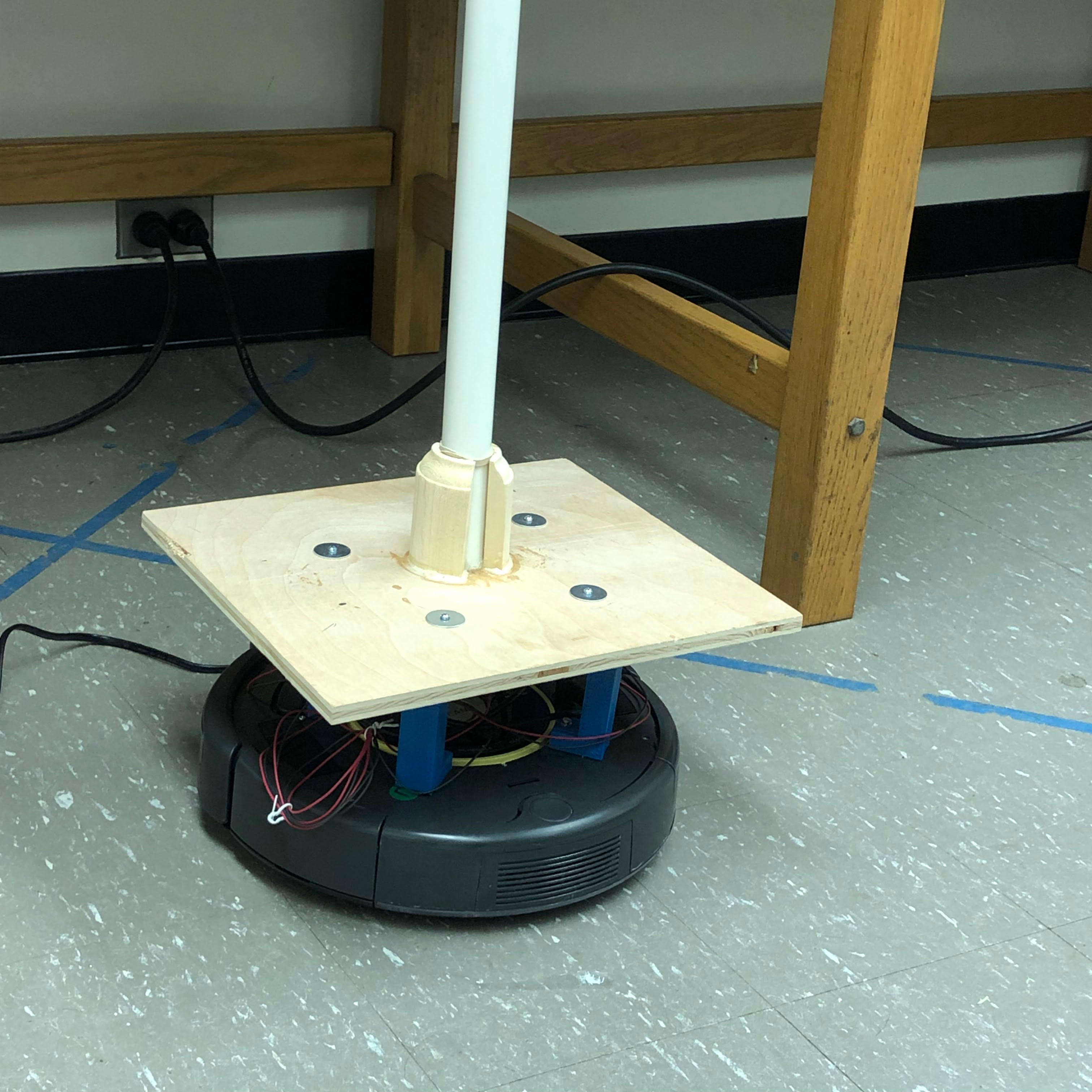
The purpose of this project was to design and build a robot that moves around a room, provide a visual of its surroundings, and follow orders from someone in a different state. This robot uses a roomba to move around, a Raspberry Pi to command the roomba, and a camera to display what’s around it. My job was to create a mount that would attach to the roomba and hold the Raspberry Pi and camera together.